MORE
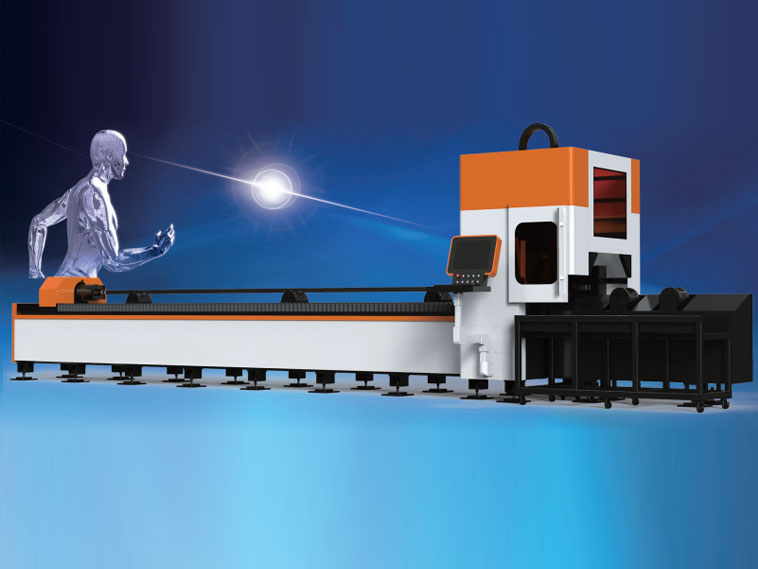
龙门吊挂式三维激光切割机
06-29
05-25
02-28
02-23
02-20
02-07
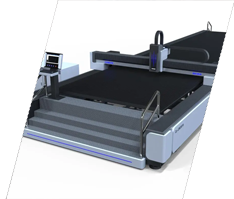
三维激光切割机装置
02-27
06-19
03-04
02-18
02-16
三维激光切割机的调焦系统
01-14
12-30
12-18
11-06
10-28
10-27